|
|
|
|
Навигация
Популярное
|
Публикации «Сигма-Тест» Классификация самолетов 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 [ 31 ] 32 33 34 35 36 37 38 39 40 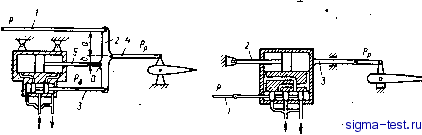 Рис. 10.36. Обратимая схема бустерного управлещм с созданием коэффициента усиления механическим способом Рис. 10.37. Обзатимая схема Вусгерного управления с созданием коэффициента усиления гидравлическим способом НОЙ С командным рычагом управления, рычаг 2 поворачивается вокруг точки Q и передвигает стержень 3, а следовательно, и шток золотника. Перемещение золотника открывает путь жидкости из магистрали нагнетания гид-росиотемы в бустер. Давление жидкости на поршень в 6ycjepe создает усилие в штоке 5, которое через рычаг 2 передается на тягу 4 и вызывает отклонение руля. Из другой полости бустера жидкость вытесняется через золотник в бачок гидросистемы. Движение рычага 2 перемещает одновременно и золотник, который при прекращении перемещения тяги / занимает нейтральное положение, перекрывая подачу жидкости в бустер. Таким образом, отклонение руля всегда следует за перемещением тяги 1 и, следовательно, за отклонением командного рычага, с которым эта тяга связана. При брошенном командном рычаге усилие в тяге 1 становится равным нулю, следовательно, рычаг 2 не будет уравновешен и под действием усилия в тяге 4 он отклонится, поворачиваясь вокруг шарнира О. Отклонение рычага 2 вызывает перемещение золотника, что приводит к подаче жидкости в бустер и перемещению его поршня. Система уравновесится прн нулевом усилии в тяге 4, т.е. тогда, когда шарнирный момент рулевой поверхности станет paBHbnsi нулю. Если усилие в тяге 1 обозначим Р, а усилие в тяге - Рр, то коэффициент усилия i = Рр/Р. Зависимость между усилиями Р и Рр получается из условий равновесия рычага 2. Если не учитывать сил трения, то эти условия запишутся в виде Ра =P5b; Pp = Pg -н р, где-Рд - условие в штоке бустера 5. Отсюда Рр= Р(- + 1). , После подстановки значения Рр получим следующее выражение для коэффициента усиления; 1 = + 1. Таким образом, коэффициент усиления в этой схеме бустера при пренебрежении силами трения определяется только соотношением размеров 1Шеч рычага 2. Схема бустера, в котором коэффициент усиления создается гидравлическим способом, показана на рис. 10.37. Бустер работает следующим образом. При передвижении тяги /, связанной с командным рычагом управления, перемещается золотник, и яид-кость из магистрали нагнетания начинает, поступать в бустер. Давление жидкости на неподвижный поршень бустера 2 вызывает перемещение его корпуса и присоединенной к нему тяги 3 управления рулем. Из другой полости бустера жидкость через золотник идёт в бачок гидросистемы. Движение корпуса бустера вызывает одновременное перемещение жестко соединенного с ним корпуса золотника, что при остановке движения тяги 1 приводит к прекращению подачи жидкости в бустер. Таким образом, и здесь отклонение руля всегда следует за отклонением командного рычага. При брошенном командном рычаге й в этом бустере равновесие наступит тогда, когда шарнирный момент рулевой поверхности станет равным нулю. Из схемы видно, что когда Р = О, то золотник и бустер будут перемещаться до тех пор, пока не станет и Рр = 0. - Коэффициент усиления этого бустера i =Рр/Р, . - Условие равновесия бустера j Рр=Рб + Р-. Но так как Рд = pFg и Р = Pjqj, = pF зд, где р - давление жидкости в гидросистеме, а F g и Fg - площади поршней бустера и золотника, то Рр=Р(Рб + Рзол)- . - . Fg Тогда i = - f- + 1. * зол Следовательно, если не учитывать сил трения, коэффициент усиления в -этом бустере, зависит от соотношения площадей поршней бустера и золотника. - На рис. 10.38 показана схема бустера, в котором коэффициент усиления создается смешанным способом, т. е. используются оба принципа, рассмотренные в предыдущих схемах. При перемещении тяги 1, связаннойс командным рычагом,.рычаг 2 поворачивается вокруг точки О, перемещая золотник,вследствие чего жидкость из магистрали нагнетания начинает поступать в бустер. Давление жидкости на поршень бустера создает усилие в тяге J, что приводит к отклонению руля. На тягу 5 передается также усилие тяги 4, которое получается в результате приложения нагрузки на рычаг 3 в точке О от~рычага 2. Как и в предьщущих схемах, при брошенном командном рычаге система уравновешивается тогда, когда шарнирный момент рулевой поверхности становится равным нулю. Определим коэффициент усилия бустера; i=Pp/P. Условие равновесия бустера: Рр=Рб+Р4- Рис. 10.38. Обратимая схема бустерного управления с созданием- коэффициента усиления смешаннцм способом 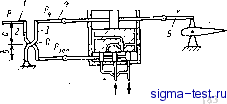 определяется из условия равновесия рьиага 3: Р4(а+Ь)= (Р + Рзол)Ь, тдеР gjj - усилие в штоке золотника. Соотношение между Р и получается из условия равновесия рычага 2: Ра=РзолЬ. ОтсюдаРз =Р--. Подставив значение Рзод, получим Р4 = Р. Если давление в гидросистеме будет р, то усилия в штоках бустера и золотника будут: Рб=РРб; Рзол = РРзол где Рб и F30J, - площади поршней бустера и золотника. ТогдаРб/Рзол = Рб/Рзол Рб откуда Рб = Рзо -р-, зол а после подстановки значения Рб=Р- Подставляя значение Рб в выражение для Рр,найдем Рр= Р(- + 1). Тогда коэффициент усиления + 1. Таким образом, коэффициент усиления этого бустера при пренебрежении силами трения зависит от соотношения плеч рычагов и от соотношения площадей поршней бустера и золотника. Силы трения, создаваемые в уплотнениях бустера и золотника, во всех рассмотренных схемах изменяют величину коэффициентов усиления, причем меньшее изменение i будет у бустеров механического типа. НЕОБРАТИМАЯ СХЕМА БУСТЕРНОГО УПРАВЛЕНИЯ Бустеры этой схемы управления, в свою очередь, можно разделить на бустеры с обратной рачажной связью и бустеры простого действия. На рис. 10.39 изобоажена схема бустера с обратной рычажной связью. При перемещении тяги .связанной с командным рычагом, поворачива- ется рычаг 2 и передвигает золотник, что открывает доступ в бустер жидкости из магистрали нагнетания. Под давлением жидкости поршень бустера Рис. 10.39. Необратимая схема управ-if ленИя С бустером с обратной рычаж ной связью - Командный рычаг 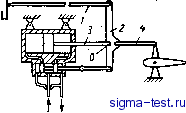 со штоком 3 и тяга 4 начинают перемещаться, отклоняя руль. При этом начинает двигаться рычаг 2, вызьшая перемещение золотника, благодаря чему отклонение рулевой поверхности следует за перемещением тяги 7, а следовательно, и за отклонением командного рычага, с которым эта тяга связана. - Усилие на командном рычаге, имитирующее чувство управления, создается загрузочным механизмом 5. При брошенном командном рычаге загрузор1ый механизм устанавливает в нейтральное положение тягу 1, что приводит к установке в нейтральное положение и рулевой поверхности. Схема бустера простого действия показана на рис. 10.40. Здесь перемещение тяги }, связанной с командным рычагом, вызывает перемещение золотника, благодаря чему жидкость из магистрали нагнетания поступает в бустер. Давление жидкости на неподвижный поршень бустера 2 вызывает перемещение его корпуса и присоединенной к нему тяги 3, что приводит к отклонению руля. Движение корпуса бустера вызьшает перемещение жесткосое-диненного с-ним корпуса золотника, чем и обеспечивается пропорциональность отклонения руля отклонению командного рьиага. Чувство управления обеспечивается загрузочным механизмом 4. Здесь так же, как и в предыдущей схеме, при брошенном командном рычаге загрузочный механизм устанавливает тягу / в нейтральное положение, что приводит к установке в нейтральное положение и рулевой поверхности ЗАГРУЗОЧНЫЕ МЕХАНИЗМЫ Загрузочные механизмы служат для создания требуемых усилий на командных рычагах при отклонении рулей и обеспечивают обратимость управления. Для уменьшения нагрузок и трения в проводке управления загрузочные механизмы устанавливаются вблизи командных рычагов. , Простейшим загрузочным механизмом является пружиНа (рис. 10.41), характеристики которой выбираются по величине максимального усилия на командном рьиаге. Такой загрузочный механизм обеспечивает линейное изменение усилий на командном рычаге по его углу отклонения. Крупным недостатком этого механизма является малая величина усилий на командном рычаге при малых yrtiax его отклонения. При большом скоростном напоре (полет с большой дозвуковой скоростью на малой высоте) даже небольшое отклонение рулевой поверхности, соотвествующее Командный рычаг Рис. 10.40. Необратимая схема управления с бустером простого действия 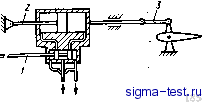 Предварительная затяжка пружины, 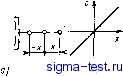 Рис. 10.41. Пружинный загрузочный Рис. 10.42. Пружинный загрузочный меха- механизм: низм с дополнителы1Ымй пружинами; i я - схема механизма; б - диаграмма а - схема механизма; б - диаграмма об- обжатия жатия небольшому отклоненшо командного рычага н требующее поэтому малого усилия, 1иожет вызвать недопустимую перегрузку. И наоборот, при требуемых больших отклонениях руля усилие на командном рычаге может оказаться недопустимо большим. Для создания большого усилия при малом отклонении командного рычага применяются загрузочные механизмы с дополнительными пружинами <рис. 10.42). Усилия, создаваемые пружинными механизмами, зависят лишь от угла отклонения командного рычага, а следовательно, и от угла отклонения рулевой поверхности, но не зависят от скоростного .напора. Чтобы пилот ощущал изменение режима полета по изменению усилий на командном рычаге, применяются более сложные загрузочные механизмы, обеспечивающие коррекцию по скоростному напору. В таких механизмах загрузка от скоростного напора может создаваться двумя способами: непосредственно и с помощью силовбго привода, управляемого автоматом, на чувствительный элемент которрго Jдeйcтвyeт скоростной напор. 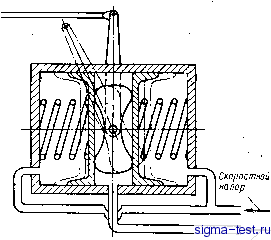 Статическое давление Уис. 10.43. Схема загрузочного механизма с непосредственной коррекцией по скоростному напору, Сигнал триммироВания -Л1г Рис. 10.44. Схема установки механизма триммирования: 1 трехпозиционный тумблер; 2 - механизм триммирования; 5 - загрузочный механизм; Д1т - управляемый летчиком ход механизма Схема одного из загрузочных механизмов, в котором нагрузка от скоростного напора создается непосредственно, показана на рис. 10.43. При брошенном, командном рычаге все типы загрузочных механизмов обеспечивают возвращение руля в нейтральное положение. Использование для аэродинами- ВД ческой балансировки самолета триммеров на рулевых поверхностях, управляемых с помощью бустеров, установленных по необратимой схеме, естественно, невозможно. Поэтому здесь для снятия усилия с командного рычага в установившемся режиме полета применяется специальный механизм, смещающий точку крепления загрузочного механизма. Так как использование этого механизма coasaaer тот же эффект, что и использование триммера, он носит название механизма триммирования. Схема установки механизма триммирования показана на рис. 10.44. Отклоняя в ту или другую сторону трехпозиционный тумблер (или гашетку), пилот включает привод, который и смещает загрузочньгй механизм в требуемом нагфавлении. к бус-- ГЛАВА П. ШАССИ САМОЛЕТА § I. НАЗНАЧЕНИЕ ШАССИ И ТРЕБОВАНИЯ К НЕМУ Шасси служит для обеспечения разбега самолета перед взлетом и пробе га после посадки, для движения по аэродрому и для смягчения ударов, воз~ пикающих при посадке и движении. В этой главе будет рассмотрено только колесное шасси самолета На самолетах, скорость полета которых превышает 200 ... 250 км/ч шасси делается убирающимся. Это объясняется тем, что при такой скорости полета вьшгрыш в тяге от уменьшения лобового сопротивления из-за у бс-ки шасси будет большим, чем проигрыш от утяжеления конструкции, вызванного установкой механизма уборки. К шасси предъявляются следующие основные требования. 1. Обеспечение устойчивости и маневренности самолета при движении по аэродрому и возможность управления по тангажу на разбеге. 2. Обеспечение необходимой проходимости по аэродрому. 3. Исключение возможности капотирования самолета. 4. Обеспечение потребного посадочного угла атаки и необходимого расстояния от нижней точки самолета до поверхности аэродрома. 5. Поглощение кинетической энергии ударов при посадке самолета в при его движении по неровной поверхности с целью уменьш.ения перегру-
|
|
© 2010 www.sigma-test.ru Санкт-Петербург: +7 (812) 265-34-48, +7 (812) 567-94-10
Разработка и поддержка сайта: +7(495)795-01-39 после гудка 148651, sigma-test.ru(my_love_dog)r01-service.ru Копирование текстовой и графической информации разрешено при наличии ссылки. |