|
|
|
|
Навигация
Популярное
|
Публикации «Сигма-Тест» Классификация самолетов 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 [ 30 ] 31 32 33 34 35 36 37 38 39 40 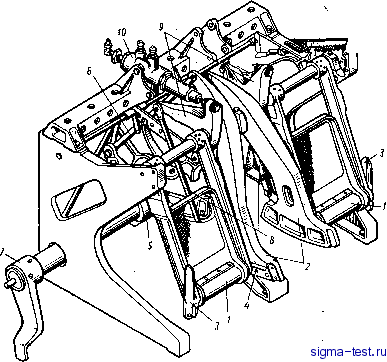 Рис. 10.25. Пост ножного управления с качающимися педалями I ~ педаль; 2 - сектор; 3 - рьиаг стопора; 4 - гнездо стопора; 5 - рычаг; б - тяга-/ - рычаг управления рулем направления; 8 - тяги управления тормозами; 9 - качалка; 10 - клапан тормоза лете большой продолжительности полета с одинарным постом, управляемым посменно двумя пилотами, обязательно должна предусматриваться возможность регулировки педалей в полете. Подножки педалей имеют различную фо1му. Наиболее простыми являются трубчатая и призматическая формы. Встречаются подножки, выполненные по форме стопы. Опорная поверхность подножки имеет насечку препятствующую соскальзыванию ноги пилота. Для этого же на педаляхимеются ремни. На постах ножного управления очень часто монтируется управление тормозами колес самолета. Для включения тормозов необходимо либо повернуть относительно горизонтальной оси педаль, нажав на нее носком ноги (рис. 10.25), либо нажать ногой на специальную гашетку, установленную на педали. На рис. 10.24 показана конструкция поста ножного управления с парал-лелограммным механизмом, а на рис. 10.25 - конструкция поста с педалями качающимися, относительно горизонтальной оси. КОНСТРУКЦИЯ ДЕТАЛЕЙ ПГОВОДКИ УПРАВЛЕНИЯ К деталям жесткой проводки управления относятся тяги, качалки, роликовые направляющие.  Рис. 10.26. Регулируемый наконечник: 1 - стакан; 2 - вилка (ушко); 3 - контргайка Рис. 10.27. Нерегулируемый наконечник Тяга состоит из трубы и двух наконечников. Труба изготовляется из алюминиевого сплава, а у коротких, сильно нагруженных тяг - из стали. Тяги разделяются на регулируемые и нерегулируемые. У регулируемых по длине тяг одш1 из наконечников делается регулируемым. Он состоит из стакана, ушка или вилки и контргайки (рис. 10.26). Стакан крепится к трубе пистонами или болтами. Другой конец стакана имеет отверстие с резьбой для ввинчивания ушка или вилки. Контргайка служит для устранения люфта в резьбе. Нерегулируемый наконечник представляет собой ушковый или вильчатый стакан (рис. 10.27), крепление которого к трубе осуществляется при помощи пистонов или болтов. ВильЧатый наконечник соединяется с ушком качалки, а ушковый наконечник - с вилкой качалки. Для уменьшения сил трения в ушковых наконечниках и в ушках качалок устанавливаются ша-рикоподщицники. Обычно применяются радиальные сферические шарикоподшипники с выступающим внутренним кольцом, допускающие небольшой перекос колец. Постановка таких подшипников упрощает монтаж проводки, исключает возможность ее заедания от перекосов при деформациях конструкции самолета. В тяге, один из концов которой при управлении или при технологических перекосах должен поворачиваться относительно ее оси (например, тяга, присоединенная к ручке управления), устанавливается вращающийся на двух упорных шарикоподшипникахушковый или вильчатый наконечник (рис. 10.28). Качалки могут быть штампованными, сварными и фрезерованными. Штампованные качалки изготовляются в основном из алюминиевых сплавов. Для уменьшения сил трения качалка вращается на двух запрессованных в нее шарикоподшипниках (рис. 10.29). Сварная качалка, изготовленная из двух стальных щек, показана на рис. 10.30. В качалку вварена втулка, в которую запрессованьрдва шарикоподшипника. Качалки крепятся на кронштейнах при помощи болтов. Роликовая направляющая (рис. 10.31) состоит из кроштейна, роликов и болтов или валиков, служащих для роликов осями. Кронштейн изготовляется обычно литьем из магниевого сплава. Ролики могут быть металличес- 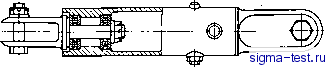 . Рис. 10.28. Тяга с вращающимся наконечником 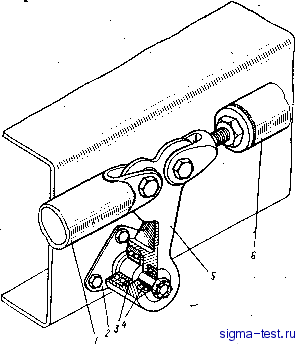 Рис. 10.29. Штампованная качалка: 1, 6 - тяги; 2 - кронштейн; 3,4 - ша1я1коподшшшикн; 5 - качалка 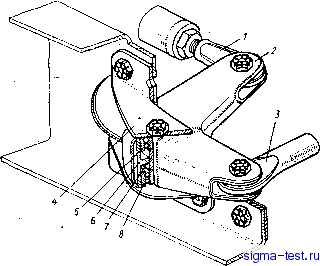 1,3 -178 Рис. 10.30. Сварная качалка: ги; 2- качалка; 4 - кротшггейн; 5, 8 - шарикоподшипники; б - стальная втулка; 7 - распорная отутса  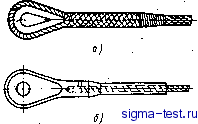 Рис. 10.31. Роликовая направляющая Рис. 10.32. Способы заделки концов троса Рйс. 10.33. Тандер кими И пластмассовыми. Металлический ролик состоит из кольца и запрессованного в него шарикоподшипника. Иногда в качестве роликов используются одни шарикоподшш1НИки. В последнее время широко применяются ролики, из капрона. Направляющая, как правило, имеет три ролика, установленных радиально под углом 120 . К деталям гибкой проводки управления относятся тросы, секторы, ролики, тандеры. Трос изготовляется из большого числа тонких проволочек. Диаметр троса выбирается исходя из Действуйщего на него усилия. Перед постановкой трос предварительно вытягивается под нагрузкой, составляющей при-умерно 50% разрушающей. Конец троса заделывается в виде петли, в которую для предохранения от перетирания устанавливается коуш <рис. 10.32, а). Коуш изготовляется из стали или пластмассы. В пластмассовые коуши могут запрессовываться стальные втулки. Недостатком такой заделки является вытяжка троса в этом месте иэ- 3а его заплетки и перегиба. Поэтому в последнее время широкое применение нашла заделка троса обжатием в специальных наконечниках (рис. 10.32, б). Регулировка натяжения тросов производится при помощи, тандеров ,(рис. 10.33). Тандер состоит из муфты и двух наконечников. Внутреннее отверстие муфты имеет резьбу. На одной половине муфты и на одном нако- 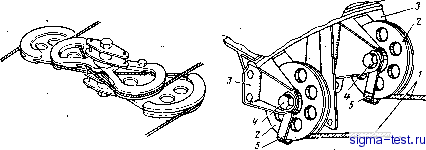 Рис. 10.34. Сектор Рис. 10.35. Установка роликов: / - трос; 2 - ролик; 3 - кронштейн; 4 - болт; 5 - ограничитель нечнике резьба правая, на другой половине муфты и на другом наконечнике -левая. Натяжение троса производится вращением муфты. Секторы, изготовляемые литьем или штамповкой из магниевых нли алюминиевых сплавов, представляют собой часть диска с канавками на обо де для тросов (рис. 10.34). Направляющие ролики, служащие для поддержания тросов, изготовляются из пластмассы или алюминиевых сплавОв. Для уменьшения трения в ролик запрессовьгеаются шарикоподшипники. В ободе ролика имеется канавка для троса. Диаметр роликов выбирается в зависимости от диаметра троса и угла охвата. Чтобы исключить соскальзывание троса с ролика, устанавливаются специальные ограничители. Крепится ролик на кронштейне при помощи болта, являющегося осью вращения (рис. 10.35). § 6. БУСТЕРНОЕ УПРАВЛЕНИЕ НАЗНАЧЕНИЕ БУСТЕРНОГО УПРАВЛЕНИЯ И ТРЕБОВАНИЯ К НЕМУ . С ростом скорости полета и особенно При переходе к сверхзвуковым скоростям происходит перемещение центра давления рулевой поверхности. По этой причине шарнирные моменты рулей и элеронов с изменением скорости могут резко изменять свою величину, а в некоторых случаях даже и знак. Это приводит к тому, что у околозвуковых и сверхзвуковых самолетов нельзя обеспечить необходимую аэродинамическую компенсацию на всех режимах полета. У таких самолетов максимальные усилия на команд-ных рычагах могут оказаться очень большими и пилот при помощи мускульной силы либо совсем не сможет отклонить рулевые поверхности, либо не сможет отклонить их с требуемой скоростью для обеспечения необходимой маневренности. Изменение же знака шарнирно момента рулевой поверхности у сверхзвукового самолета приводит к нарушению чувства управляемости. На таких самолетах для обеспечения нормальной управляемости в системах управления рулевыми поверхностями устанавливаются специальные усилители - бустеры. К бустерному управлению предъявляются следующие основные требования: 1) сохранение у пилота чувства управления; 2) возможность управления самолетом в случае выхода из строя бустера, что обеспечивается переходом на непосредственное управДение либо включением аварийной системы; 3) возвращение рулей в нейтральное положение при брошенных командных рычагах (обратимость управления); 4) следование руля за командным рычагом практически без запаздывания при скорости его отклонения, не превышающей величины, определяемой допустимыми перегрузками при маневре; 5) простота конструкции бустера, возможно меньшая его масса, надежное! ь в зксплуатащ1и, удобство подхода к агрегатам бустера для осмотра и регламентных работ. Силовой привод бустера располагается как можно ближе к рулевой поверхности, что уменьшает нагрузки и трение в проводке управления, а следовательно, позволяет уменьшить ее массу. По способу срздания усилия на командном рычаге бустерное управление можно разделить на две схемы: обратимую и необратимую. 180 При обратимой схеме бустерного управления усилие на командном рычаге пропорционально величине шарнирного момента рулевой поверхности. Здесь большая часть усилия, необходимого для отклонения руля, создается бустером, а небольшая его часть, составляющая постоянный процент от общего усилия, передается с командного рычага. При необратимой схеме бустерного управления все усилие,необходимое для отклонения рулевой поверхности, создается бустером. Для обеспечения чувства управления усилие на командном рычаге при отклонении руля создается специальным загрузочным механизмом. Здесь усилие на командном рычаге уже не будет пропорционально величине шарнирного момента. Загрузочные механизмы обеспечивают также и обратимость - возвращают рули в нейтральное полржение при брошенных командных рычагах, На скоростных дозвуковых самолетах для., получения допустимой (с тоски зрения усилия на командаом рычаге) величины шарнирного момента руля требуется большая аэродинамическая компенсация. Вследствие нели-нейноети характеристики шарнирного момента по углу отклонения руля возможно частичная перекомпенсация руля на некоторых углах его отклонения. Во избежание этого приходится уменьшать азрбдинамическую компенсацию, что приводит к увеличению усилий на командном рычаге. Поэтому на таких самолетах целесообразно применять обратимую схему бустерного управления. На сверхзвуковых самолетах, где при возникновении кризисных явлений происходит резкое изменение величин шарнирных моментов, а в некоторых случаях даже и изменение их знака, применяется необратимая схема бустерного управления. Необратимая схема бустерного управления всегда применяется на сверхзвуковых самолетах с цельноуправляемым горизонтальным оперением. Ось вращения оперения для уменьшения величин шарнирных моментов размещают между центрами давления при дозвуковой и сверхзвуковой скорости. По этой причине шарнирные момент цельноуправляемого горизонтального оперения при переходе с дозвуковой к сверхзвуковой скорости - меняет свой знак, что и делает невозможным применение обратимой схемы бустерного управления (из-за создания неправильных усилий на командном рычаге). Бустеры Могут быть электрическими и гидравлическими. Более широкое применение получили гидравлические бустеры. По типу силового привода различают гидравлические бустеры поступательного и вращательного действия. Значительно чаще применяются гидравлические бустеры поступательного действия, схемы которых и будут рассмотрены в этом разделе. ОБРАТИМАЯ СХЕМА БУСТЕРНОГО УПРАВЛЕНИЯ Обратимая схема бустерного управления характеризуется так называемым коэффициентом усиления, который представляет собой отношение величины общего усилия, необходимого для отклонения рулевой поверхности, к величине усилия, передаваемого с командного рычага. Коэффициент усиления может создаваться тремя способами: механическим, гидравлическим и смешанным. На рис. 10.36 показана схема бустера, в котором коэффициент усиления создается механическим способом. Бустер работает следующим образом. При перемещении тяги 7, связан-
|
|
© 2010 www.sigma-test.ru Санкт-Петербург: +7 (812) 265-34-48, +7 (812) 567-94-10
Разработка и поддержка сайта: +7(495)795-01-39 после гудка 148651, sigma-test.ru(my_love_dog)r01-service.ru Копирование текстовой и графической информации разрешено при наличии ссылки. |