|
|
|
|
Навигация
Популярное
|
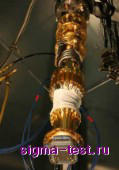
Публикации «Сигма-Тест» Газодинамические подшипники 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 [ 26 ] 27 28 29 30 31 32 33 34 Для многолепесткового подшипника функция зазора, отвечающая равновесному положению вала, 0=1-цсовпц). (6.52) Подставляя (6.51) в (6.16), получим 4-1 2я Л itl [.Re/ c- l + 4(Re/ -i; i)] it = Здесь X = COS Пф (6.53) Ti играет роль экс- о, б -средний зазор; Е = (h, -hJ 1/2. центр иситета е Вычисляя интегралы, которые будут иметь те же значения, что и для расчета кругового подшипника (при п = 1), получим следующий результат: 4(i Ti2)3/2 l + x (6.54) Величины А и В будут зависеть в данном случае от х = Хо/ ; а = ajn и могут быть вычислены из (4.24) с помощью приложения 2. Формула (6.54) отличается от аналогичной формулы для простого цилиндрического подшипника значениями параметров х и а. Эта формула может быть уточнена путем вычисления асимп-тотического значения коэффициента а.при %-> +оо путем, указанным в п. 29. / Заметим, что коррекция по асимптотике при 3 будет давать незначительную поправку, обусловленную лишь погрешностью метода РЯ-линеаризации во втором приближении. Для эл-липсного подшипника эта поправка может быть вычислена так же, , как и в п. 29, при этом надо учесть в формуле (6.39) другие значения Geo и определяемые интегралами в (6.29). Рассмотрим эллипсный подшипник. Если для простоты пренебречь торцевой утечкой и выразить Хо через Л по формуле (6.44), то можно из (6.54) получить условие устойчивости, аналогичное (6.46), М<М,= 126ЯГ1(1 - 11)5 4 (1 - Ti2)3/2 [1 + 0,25(1-л)* Л2] (6.55) где М - безразмерная масса, которая определяется так же, как и в (6.4). Из сравнения (6.55) и (6.46) видно, что свойства эллипсного подшипника аналогичны свойствам двухвтулочного цилиндри- ческого подшипника, но максимальный возможный запас устойчивости эллипсного подшипника при прочих равных условиях будет меньше чем цилиндрического. Для эллипсного подшипника с малой относительной длиной, когда Оо = D/L > 1, правая часть неравенства (6.55) должна быть умножена на коэффициент утечки К Л I Аут - Л -Г д(1 Постоянные А и В могут бить определены также из (4.24) с помощью приложения 2. . Рассмотрим пример. Пусть эллипсный подшипник имеет следующие геометрические параметры: D = 50 мм; L = 150 мм; Лшах = 26,7 мк; hi = 14,0 мк. Таблица 3. Параметры Окр и Л для экспериментальных роторов
Экспериментальные данные по этому подшипнику имеются в работе [41 , некоторые из них приведены в табл. 3, где указаны также значения чисел сжимаемости Л, рассчитанных по формуле (6.45). Построим границу .области устойчивости в плоскости параметров М, Л. Для этого вычислим 11 = 26,7- 14,0 = 0,31. Ашах + Лтш 26,7-Ь 14,0 Подставляя т] в правую часть (6.55), получим уравнение границы области устойчивости. Область устойчивости и данные экспериментов с вертикальными валами из табл. 3 представлены на рис. 32, где точками показаны расчетные значения, соответствующие экспериментальным, показанным крестиками. Из рис. 32 видно, что в двух случаях из трех теория хорошо согласуется с экспериментом. Рассмотрим еще вопрос о выборе оптимального Т. В предыдущем параграфе говорилось, что T)opt зависит от Л. Если Л = О, то оптимальное значение близко к значению 0,31, что видно из графика, построенного на рис. 33. На рис. 32 кривые устойчивости построены для двух значений т], равных 0,31 (оптимальное) и 0,5. Рассмотрим ротор р-2 (см. табл. 3) и вычислим его безразмерную массу по формуле (6.4) / ftmm V 21.8.2,5.(14)5.10- \ R ) ~ 981 15-5-1,92 (2,5)6-10-20 0,57.
0,2 O.it 0.6 0.81 г Рнс. 32 if д 10 VI.Z.O Будем увеличивать йщах. оставляя все прочие параметры неизменными, при этом будет увеличиваться параметр т]. В результате граница области устойчивости деформируется (рис. 32), но расчетная точка р-2 остается на прежнем месте, так как при изменении т] и /itnax величины М и Л остаются постоянными. Примем новое значение т) = 0,5 и, подставив его в правую часть (6.55), построим новую границу. Из рис. 32 видно, что от новой границы точка р-2 будет отстоять дальше и, следовательно, запас устойчивости ротора увеличится. 31. Исследование устойчивости равновесного режима вращения ротора гироскопа в кардановом подвесе С целью выяснения условий работы газодинамических подшипников в гироскопических приборах рассмотрим модель симметричного уравновешенного гироскопа, вал ротора которого установлен в газодинамических опорах катушечного типа (см. рис.Е17). Кожух гироскопа предполагается установленным в идеаль-  ном кардановом подвесе, допускающем угловые перемещения относительно двух ортогональных осей. Рассматриваемая модель может служить схемой поплавкового гироскопа с тремя степенями свободы. Будем изучать малые колебания гироскопа с учетом только угловых перемещений в условиях невесомости, например, в условиях лаборатории, находящейся на орбите спутника Земли. Перекрестными связями между подсистемами угловых и поступательных движений ротора и кожуха будем пренебрегать, предполагая их достаточно малыми. Для простоты пренебрежем также влиянием упорных пластин, которые при угловых колебаниях будут несколько увеличивать угловую жесткость подвеса, и примем эллипсоид инерции кожуха симметричным. Предположим далее, что ротор и кожух совершают малые колебания в окрестности положения, в котором ось фигуры ротора перпендикулярна оси 0Y наружной рамки карданова подвеса (рис. 34). В этом случае уравнения малых колебаний кожуха не будут содержать гироскопических членов. Обозначая через At/ и комплексные угловые отклонения осей фигур ротора и кожуха от оси 0Z, запишем уравнения малых колебаний в следующем виде:  Рис. 34 h MJi = iASi + iAS - (6.56) Здесь At/ = а + ф; At/ = + ф; ASi = ASi + iS, ASiB = ASiB + iASBi /, /i - экваториальные моменты инерции соответственно ротора и кожуха; Ко = /о - кинетический момент ротора; ASi и Aib - комплексные восстанавливающий и возмущающий моменты. Так же как и в п. 24, ASi в первом приближении представляется с помощью передаточной функции, только в данном случае восстанавливающий момент A2i будет зависеть от разности угловых смещений At/ - At/j. В изображениях Лапласа этот момент запишется в виде = - ipaRL, (s, i) (At/ - At/i), (6.57) j 63 где Gi{s, i) - передаточная функция подшипника находится из решения нестационарной краевой задачи газовой смазки; ее асимптотическое представление имеет вид (5.45). Пусть ротор и кожух совершают малые угловые колебания вокруг общей неподвижной точки, когда соответствующие уравнения, описывающие эти колебания, могут быть получены из (6.56) и (6.57) путем преобразования по Лапласу при нулевых начальных условиях: 2paRLXi s] Ш = - Gi (s, i) {AU - At/i); T7 .77. , PaRl AUi = Gis,i){AU-AUi) + ~ (6.58) Напомним, что эти уравнения справедливы лишь в условиях невесомости и в случае, когда оба тела - ротор и кожух - имеют симметричные эллипсоиды инерции, а их центры масс в состоянии динамического равновесия совпадают с точкой пересечения осей идеального карданова подвеса. Кроме того, следует иметь в виду, что представление реакции подшипника с помощью передаточной функции в форме (5.45) справедливо лишь в рамках РЯ-линеари-зованной теории газовой смазки. Таким образом, мы имеем дело с математической моделью первого приближения, что, однако же, не мешает использовать ее для качественного исследования. Комбинируя уравнения (6.58), можно свести их к одному относительно разности AU - AUi. PaRLt I + h PaRL 2paRLhl J PaRLl iKSi 2paRLXo )]{AU-AUi) = PaRL 4x1 2paRLXo VpaRL- (- Из этого уравнения можно получить характеристическое уравнение. Нулевой корень не является полюсом передаточной функции замкнутой системы, описываемой уравнением (6.59), в силу чего при рассмотрении только относительных колебаний ротора и кожуха характеристическое уравнение запишется в виде iKo = 0. (6.60) в левой части этого уравнения множитель Gi(s, i) является, вообще говоря, мероморфной функцией, все полюсы которой имеют отрицательные вещественные части; в случае цилиндрического профи- лированного подшипника достаточно большой длины он имеет асимптотическое представление (5.45). Уравнение (6.60) можно переписать в виде 1+Gi(s, i)G,(s, 0 = 0. (6.61) Здесь согласно (5.45) Gi (S, i) = fli l + Pi(s-Xo) l + s-ixo (6.62) где == ° , a функция Gg (s, i) может быть представлена в виде Ga (s, i) = 2 tpS - i s{x, s~i) (6.63) PaRLxl . r-Jl±-L- r- Второе слагаемое в уравнении (6.61) представляет собой передаточную функцию разомкнутой цепи некоторого эквивалентного контура с обратной связью, а множители Gi(s, i) и 62(8, i) - суть передаточные функции двух динамических звеньев в этой цепи. Передаточная функция разомкнутой цепи Go(s, J) =Gi(s, f)G,(s, t). (6.64) Для исследования устойчивости равновесного режима применим метод амплитудно-фазовых частотных характеристик 129]. Предварительный анализ показывает, что следует различать три случая: 1) хо< т-<- Шз-</о(рис.35,а); 2)<Хо<; -f </о<-Ц(рис.35,б); 3)-< -<Хо; /o<-f (Рис.35,в). Амплитудно-фазовые характеристики, построенные для этих случаев при S = iv, -ро < V < -f оо, представлены на рис. 35. Анализ кривых приводит к выводу, что асимптотическая устойчивость имеет место только в первом случае при дополнительном условии, что точка, соответствующая s = fxo лежит слева от критической точки -1 -f tO. На основании этого приходим к следующим необходимым и достаточным условиям устойчивости подсистемы угловых пере-
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2010 www.sigma-test.ru Санкт-Петербург: +7 (812) 265-34-48, +7 (812) 567-94-10
Разработка и поддержка сайта: +7(495)795-01-39 после гудка 148651, sigma-test.ru(my_love_dog)r01-service.ru Копирование текстовой и графической информации разрешено при наличии ссылки. |