|
|
|
|
Навигация
Популярное
|
Публикации «Сигма-Тест» Газодинамические подшипники 1 2 3 4 5 6 7 8 9 10 11 12 13 14 [ 15 ] 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 где A = Ue{,}; В = \т{,]; = 1 th</ зазора Полученная формула дает аналитическое представление главного вектора сил давления, действующих со стороны смазочной пленки на шип. Формула позволяет рассчитать как несущую способность цилиндрического подшипника, так и угол нагрузки. Несущая способность определяется модулем, а угол нагрузки- - аргументом комплексного.выражения (4.26). При расчете по формуле (4.26) возникают лишь некоторые трудности, связанные с вычислением величин А и В, которые зависят от двух параметров подшипника сго и Хо; эти трудности легко устранить табулированием функции (1 = 1 {Оо, Хо) (см. приложение 2). Сопоставление результатов расчета несущей способности и угла нагрузки по этой формуле показывает хорошее совпадение с результатами в работе [57] (см. приложение 3). 17. Решение краевой задачи статики для цилиндрического подшипника с шевронными канавками, имеющими синусоидальный профиль Как известно, цилиндрические подшипники с гладкой поверхностью при малых радиальных нагрузках не обеспечивают достаточного запаса устойчивости [58]. В связи с этим, в машинах малой мощности, а также при вертикальном положении вала применяются профилированные подшипники. В настоящее время все более широкое применение находят подшипники сО спиральными канавками. Первая теоретическая разработка упорного подшипника со спиральными канавками была опубликована Уипплом в 1949 г. Методика, предложенная Уипплом, применяется для расчета и радиальных подшипников с шевронными канавками, имеющими прямоугольный профиль. В более поздней работе Вора и Чау дается теория идеализированных подшипников со спиральными канавками произвольной геометрии. В этой работе, а также в ряде других решение задачи не является равномерно точным для всех значений параметра сжимаемости и пригодно лишь для достаточно малых значений этого параметра. Этот вопрос подробно анализировался в работах Уилдмена [46, т. 90, № 4], Константинеску и Кастелли [46, т. 91, № 1]. В данном параграфе мы рассмотрим краевую задачу статики для цилиндрического подшипника с шевронными канавками при нулевом эксцентриситете (е = 0), что соответствует случаю, когда подшипник свободен от нагрузки. Постановка задачи остается такой же, что и для гладкого подшипника (см. п. 15). На рис. 22 изображена опора длиной L: а -с шевронными канавками (Li = L); б -с частичным профилированием {L, < < L); в - выбор начала координат. В этом случае функция 94 Я = 1-Т1С08(Пф4-Р9, (4.27) где Р = Posign С (Ро = const); у] = щгё ~ относительная амплитуда изменения глубины канавки; Ро =---ntgct-коэффи-циент, характеризующий наклон канавок; п - число канавок; а - угол наклона канавок к образующей; Е - амплитуда профиля синусоидальных канавок, равная половине их глубины; =zj~L-относительная координата, отсчитываемая вдоль образующей шипа от средней линии = 0. , Учитывая сим- 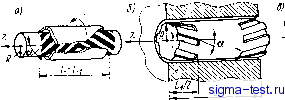 Рис. 22 метрию, будем решать краевую задачу, выраженную уравнениями (4.1), (4.2), для одной половины подшипника (О < 1). В этом случае граничные условия (4.2) можно заменить такими: ЦТ Я=+ь ;=о = 0; ф = ф+2 Г Второе условие не относится к специальному случаю, когда профилированные зоны смыкаются в точке = О (рис. 22, с). В формуле (4.27) следует положить р = Pq. Применяя обобщенный метод ЯЯ-линеаризации, решим задачу в первом приближении. Опуская промежуточные рассуждения и выкладки, которые будут такими же, как и в п. 15, сформулируем задачу 1-го приближения в комплексной форме. Для этого определим комплексный зазор, соответствующий формуле (4.27): = 1 -У]е- t(x> (4.28) где (О = мф -f РС. Краевая задача, соответствующая (4.8), (4.9), с учетом новых граничных условий, преобразуется к виду: JU + а1Жц - %оЖ; = fXo Tie- ; Ж 1=1 = 0; Ж1 j=o = 0; Ж\ц, = Ж ф+2л-Решение уравнения (4.29) будем искать в форме (4.29) (4.30) (4.31) 95 Подставляя (4.31) в (4.29) и учитывая (4.30), получим одномерную краевую задачу для / (Q: /;-2ф /;-(-Ь + р§) / =4-; Д(0) = 0; / ( ! 1) = О, Хо . о tgg -ТГ- > Ро - -Z- (4.32) Эта линейная задача может быть решена в конечном виде (4.33) (4.34) В отличие от подшипника с гладкой втулкой, в случае шевронного профиля решение 1-го приближения (4.33) получается довольно сложным, поэтому в следующем параграфе мы займемся анализом уравнения (4.32) другим способом. Заметим, что для цилиндрического подшипника с синусоидальным профилем при нулевом угле наклона (а = 0) из (4.33) получается решение вида (4.14) Рассмотрим теперь 2-е приближение. Для вычисления поправки снова обращаемся к уравнению (3.55). В данном случае ф О и уравнение (3.55) будет иметь вид Граничные условия для А () должны быть нулевыми, так как решение первого приближения Wi удовлетворяет граничным условиям точно. Для области 1 1 ==с 1 имеем А(0) =А(+1) = 0. Интегрируя (4.35) два раза, получим (4.36) о 11. После нахождения произвольных постоянных это выражение примет вид 2л I 2л АХО = (H - YW) йф + 4я . dZ\WWid(p. (4.37) Учитывая (4.28), сделаем замену переменной интегрирования по формулам: Ф = 4-(со-Ш; = ф=-4. (4.38) В результате получаем А(9 = ХЯ -ВДЙсо-d?№dco. (4.39) о £0 где Я = 1 - т] COS ю; ю = Пф -f pg; О < ? < 1. При ? = О следует полагать Р = О, тогда выражение (4.39) будет справедливо в замкнутом промежутке О 1. Эта особенность объясняется тем, что функция зазора Я терпит разрыв 1-го рода в точке- S = 0. Для того чтобы вычислить поправку А (Q окончательно, необходимо подставить в (4.39) решение 1-го приближения Чц которое согласно (4.33) имеет выражение ,=.НцКе[!Л)е- }, (4.40) отсюда можно получить = 4- [4 + ri (1 + ЫГе- + ril + ГпГ е + + 4т1 (1 +/ ) е- + 4т1 (1 + /;) е + 2ti] 1 + / f]. (4.41) Здесь fn -сопряженная комплексная функция. Подставляя это выражение в (4.39) и вычисляя интегралы, получим 1т/ Мф, (4.42) где р = Ро > О при О < ? < 1 и р = О при g = 0. Первое слагаемое в полученном выражении соответствует поправке к решению в случае подшипника с гладкой втулкой, но отличным от нуля эксцентриситетом (см. 4.18), а второе слагаемое характеризует эффект поперечного нагнетания. Полное решение во втором приближении запишется в виде % = + А (9 = 1 - т] cos 0) + Т1 Re if (О е--) + + Ч\ ( Re {fn (D) - 4- 1 fn (Q I) - -f P 1 1/. (01 d p = po; 0<g<l; 0<ф<2я. (4.43) В этом решении со = Пф -f pg, а / (t) определяется выражением (4.33). Напомним, что здесь мы получили решение для случая несмещенного шипа, когда е = О, однако оно позволяет вычислить важнейшие статические и динамические характери- 7 в. и, Дроздович 97 стики -статическую и вихревую жесткость подшипника (см. гл. V). Кроме того, полученное решение пригодно для исследования упорного кольцевого подшипника с шевронными канавками, точнее, его модели в виде прямолинейной полосы бесконечной длины. Такой моделью пользовался Уилдмен [46, т. 90, № 4] при исследовании упорного подшипника с шевронными канавками. Можно показать, что все результаты этой работы вытекают из данного решения. 18. Качественное исследование упорного подшипника с шевронными канавками Рассмотрим модель упорного подшипника, образованную разверткой концентрически расположенных несущих поверхностей радиального подшипника. На рис. 23 показаны упорный кольцевой подшипник с шевронными канавками и его модель: а - упорный диск; б - развертка диска в полосу (видхверху); в - продоль- у/огарисрмттая спирало выступ  НаиаШ Рис. 23 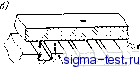 ный разрез полосы подшипника. Для этой модели будут справедливы все результаты, полученные в предыдущем параграфе, если мы потребуем, чтобы скорость скольжения верхней полосы с гладкой поверхностью была равна окружной скорости шипа V = QR. В этой модели угол ф будет играть роль безразмерной координаты, а радиус R - роль единицы масштаба. Результирующая сила давления смазочного слоя на верхнюю пластину длиной 2nR = 2ягв и шириной L = Га -ri может быть вычислена по следующей формуле: nDLpa (4.44) где можно взять из (4.43); область интегрирования S заключена в пределах: -ls;cs£;+l; 0=££фй£ 2п. Расчет несущей способности по формуле (4.44) целесообразно делать на ЭВМ, несмотря на то что все интегралы вычисляются й конечном виде. Именно этим путем производилось исследование упорного подшипника Уилдменом на базе решения уравнения Рейнольдса методом малого параметра [46, т. 90, № 4]. Для качественного исследования удобно, по крайней мере на первом этапе, иметь аналитические представления основных характеристик подшипника. Для того чтобы найти аналитическое представление несущей способности и жесткости упорного подшипника желательно прежде всего, упростить выражение (4.33) для функции / (Q. Такое упрощение может быть получено путем разложения функции / {I) в ряд по собственным функциям оператора дифференциального уравнения (4.32). Рассмотрим для этого следующую вспомогательную краевую задачу типа Штурма-Лиувилля: X (Ф) = Ф - 2фоФг - гФ = иФ; Ф : 2 = Ф ;+2, (4.45) где р - произвольная константа. Соответствующие краевой задаче (4.45) собственные функции и собственные числа будут таковы; k = 0, ±1, ±2,... (4.46) (2fe-i)-p; Собственные функции Ф (Q удовлетворяют следующим условиям ортогональности: (Фь Ф/) f Ф,ф; = Р Р = (4.47) -1 [ О при кф ]. Здесь Ф/ {Q - сопряженная комплексная функция по отношению к (9. Принимая собственные функции (4.46) в качестве координатных, представим искомое решение уравнения (4.32) в виде суммы ряда / (Q= ЕаДФ; + Фу-1). (4.48) Легко видеть, что каждый /-й член этой суммы удовлетворяет граничным условиям: S = 0; = Подставляя (4.48) в (4.32) и учитывая (4.45), получим в силу линейности оператора fn ® = S а/ (5Ф/ + 5Ф1-/) = 2 /(1/Ф, + Щ ,Фм) =
|
|
© 2010 www.sigma-test.ru Санкт-Петербург: +7 (812) 265-34-48, +7 (812) 567-94-10
Разработка и поддержка сайта: +7(495)795-01-39 после гудка 148651, sigma-test.ru(my_love_dog)r01-service.ru Копирование текстовой и графической информации разрешено при наличии ссылки. |