|
|
|
|
Навигация
Популярное
|
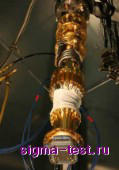
Публикации «Сигма-Тест» Конструирование электрических машин 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 [ 17 ] 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 вующей классу нагревостойкости системы изоляции, примененной в двигателе, Ом. Для расчета электрических потерь в обмотке ротора можно также воспользоваться выражением, Вт, Яэ2 = эм, (6.10) где Рэм - электромагнитная мощность асинхронного двигателя, Вт: Яэм = Я1-Ям-Яэ1; (6.11) Pi - мощность, подводимая к двигателю из сети, Вт: Pi = /ni/iC/i 0MC0S9i. (6.12) В двигателях с фазным ротором имеют место еще и электрические потери в переходном щеточном контакте фазного ротора, Вт: Рз,щ = 34А/щ/2, (6.12а) где АПщ - переходное падение напряжения на пару щеток, В (см. табл. 2.3). Основные механические потери в асинхронном двигателе - это потери на трение в подшипниках и на вентиляцию; для асинхронных двигателей со степенью защиты IP44 и способом охлаждения IC0141 их можно определить по формуле Mex = *T( l-lO-3)MDiH-lO-2)*, (6.13) г 1,3(1 -DiH-10-3) при 2р = 2; f yfe = 1 при 2р > 2. Основные механические потери двигателей со степенью защиты IP23 и способом охлаждения IC01 без радиальных вентиляционных каналов с вентиляционными лопатками на короткозамыкающих кольцах (6.14) Рмех = Л 1-10-¥(г10~Т-101 (6.15) Значение коэффициента принимается в зависимости от внутреннего диаметра сердечника статора Di: для двигателей с 2р = 2 йт=6 при Z)i>250 мм и т = 5 при Di<250 мм; для двигателей с 2р>2 кт:=7 при Di>250 мм и т = 6 при Di<250 мм. В асинхронных двигателях с фазным ротором механические потери обусловлены еще и трением щеток о контактные кольца, Вт, Рмех,щ = т,щ-Рщ5щУк,к-10-б, (6.16) где йтщ-коэффициент трения щеток: т,1ц=0,15--0,17; Рщ - давление щеток. Па, принимают по табл. 2.2 в зависимости от марки щеток; 5щ - общая площадь контактной поверхности всех щеток, мм: (6.17) 5щ = З/а/Д, /г - ток ротора, определяется по (5.81); Дщ - допустимая плотность тока, А/мм2, определяется по табл. 2.2; Uk,k-окружная скорость контактных колец, м/с: Vk.k = л4.,кП1- 10-3/60; (6.18) dk,k - диаметр контактного кольца, предварительно можно принять d . = (0,400,45)Di, мм. Значение окружной скорости контактных колец, рассчитанное по (6.18), не должно превышать допустимого значения по табл. 2.2. Добавочные потери -это потери, возникающие из-за высших гармоник МДС обмоток, потока рассеяния обмоток, пульсации магнитного поля в воздушном зазоре, вытеснения тока в проводниках и других неосновных электромагнитных процессов в электрической машине. Добавочные потери асинхронных двигателей в соответствии с ГОСТ 11828-75 принимают равными 0,5 % потребляемой двигателем мощности Pi в номинальном режиме, Вт, Рдоб = 0,005Рг]0Хом, (6.19) где У] иом - предварительное значение КПД двигателя по рис. 5.1. В асинхронных двигателях с короткозамкнутым ротором, особенно при скошенных пазах, возникают поперечные токи между стержнями короткозамкнутой клетки вследствие замыкания этих стержней листами сердечника. В таких двигателях добавочные потери могут достигать 1-2 % и более подводимой к двигателю мощности. Поэтому в некоторых методиках по расчету таких двигателей имеются указания по уточненному расчету добавочных потерь. При расчете добавочных потерь для неноминального режима работы двигателя следует воспользоваться выражением Р = Р доб доб (А/А, ом) р р доб 1*> (6.20) с некоторым приближением эти потери можно определить по формуле ;об Рдоб (2/ ом) = доб (6.20а) Коэффициент полезного действия асинхронного двигателя Л = Р2/Р1 = 1 - 2P/Pi, (6.21) где 2Р суммарные потери в двигателе, кВт: 2Р = (Р + Рз, +. Рз, + Р + Рд,). 10-3; (6.22) Pi - подводимая к двигателю мощность, кВт: Рг = Р2 + 2Р. (6.23) 105 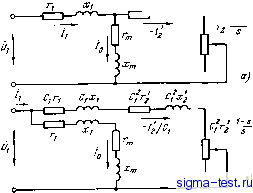 6.2. СХЕМА ЗАМЕЩЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ Асинхронный двигатель в процессе эксплуатации может работать в диапазоне нагрузок от холостого хода до номинальной. При этом его основные параметры - потребляемые ток и мощность, частота вращения, КПД, коэффициент мощности, скольжение и др. - находятся в определенной зависимости от нагрузки на валу двигателя. Графически выраженные зависимости подводимой мощности Pi, тока в цепи ста- -1 onoi тора /ь электромагнитного момента М, частоты вращения 2, КПД и коэффициента мощности cos ф1 от полезной мощности двигателя Рг называют рабочими характеристиками асинхронного двигателя. Существует два метода расчета рабочих характеристик: графический (по круговой диаграмме) и аналитический. В основу каждого из этих методов положена схема замещения (рис. 6.1,а). Более удобной для практического Ьспользования является схема замещения рис. 6.1,6. Однако расчет параметров этой преобразованной схемы замещения требует определения коэффициента cj. Для двигателей мощностью более 1 кВт коэффициент Ci с достаточной точностью можно определить по формуле Cxl+(x,/xJ. (6.24) Сопротивления схемы замещения двигателя Г;, Xi, Гг, Х2 и Хт рассчитывают по формулам, приведенным в § 5.3-5.6. Активное сопротивление ветви намагничивания схемы замещения с некоторым приближением можно определить по формуле, Ом, где Рм - основные магнитные потери (6.7), Вт; /ц - намагничивающий ток статора (5.196), А. Используя схему замещения асинхронного двигателя для расчета рабочих характеристик, исходят из предположения, что параметры схемы замещения при изменениях нагрузки двигателя остаются неизменными. Однако анализ работы асинхронного двигателя показывает, что с ростом тока в обмотках двигателя увеличивается насыщение зубцового слоя от магнитных полей рассеяния. Кроме того, при больших скольжениях следует учитывать Рис. 6.1. Схемы замещения ансинхронного двигателя эффект вытеснения тока в стержнях обмотки ротора. В итоге рост нагрузки двигателя сопровождается некоторым уменьшением индуктивного сопротивления и увеличением активного сопротивления ротора. Опыт показывает, что для асинхронных двигателей общего назначения с некоторым допущением можно принять параметры схемы замещения неизменными в диапазоне нагрузок, соответствующих скольжению s 0-f-SKp, где 5кр - критическое скольжение, т. е. пока электромагнитный момент двигателя не достигнет максимального значения. При 5>5кр влияние перечисленных факторов на параметры схемы замещения столь значительны, что это требует их пересчета. 6.3. ПОСТРОЕНИЕ УПРОЩЕННОЙ КРУГОВОЙ ДИАГРАММЫ Для построения упрощенной круговой диаграммы асинхронного двигателя необходимо определить следующие величины: электрические потери в обмотке статора в режиме холостого хода, Вт, Psio J?ri, (6.26) где/о - предварительное значение тока идеального холостого хода, А, т. е. тока холостого хода, соответствующего синхронной частоте вращения ротора двигателя; с некоторым приближением его можно принять равным намагничивающему току статора: потери в режиме холостого хода, Вт, 0 = -910 + + Рмех! активную составляющую тока холостого хода. А, ток холостого хода. А, коэффициент мощности в рел<име холостого хода cos фо = /оа о- Индуктивное и активное сопротивления короткого замыкания. Ом, соответствующие параметрам схемы замещения при работе двигателя со скольжением sSkp, = 11+? 4; k = ii+I2- (6-32) Круговую диаграмму строим в следующем порядке (рис. 6.2). Проведя оси координат, отложим вектор напряжения Uu ;ом. оатем, выбрав масштаб тока т{ (А/мм), проведем вектор тока /о (отре- (6.27) (6,28) (6.29) (6.30) (6.31) зок ОН) под углом фо к оси ординат. Затем из точки Я - точки холостого хода (s=0) -начертим прямую, параллельную оси абсцисс, на которой отложим отрезок НС, представляющий собой диаметр окружности тока, мм, . = (1но /<)Ч- (6.33) Для получения необходимой точности при определении рабочих характеристик по круговой диаграмме следует принять масштаб 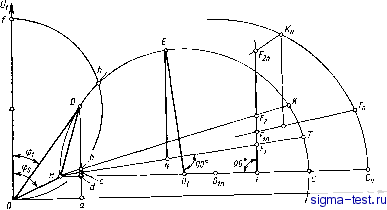 Ррс. 6.2. Упрощенная круговая диаграмма трехфазного асинхронного двигателя тока Mi таким, чтобы диаметр окружности тока Di был не менее 200 мм, при этом все построения следует вести остро отточенным карандашом. Разделив отрезок НС на две равные части, получим точку Oi- центр окружности токов, из которой радиусом Di/2 проведем полуокружность тока. На прямой О,С (точка F) восставим перпендикуляр, на котором отложим отрезки, мм, FF, = г[ HF/x; FF, = г, HF/x. (6.34) Из точки Я через точки Fi и F2 проведем прямые до пересечения с окружностью тока в точках Т и К. Точка Т соответствует скольжению s = ±oo, а прямая НТ является линией электромагнитной мощности (момента). Точка /( - точка короткого замыкания-соответствует скольжению s=l, а прямая НК является линией полезной мощности. Построенная круговая диаграмма может быть использована для нахождения параметров, необходимых для получения рабочих характеристик асинхронного двигателя при нагрузках, соответствующих скольжению 5<5кр. Точка Е на окружности токов соответствует максимальному моменту двигателя. Положение этой точки определим следующим образом:из точки Oi опустим перпендикуляр на линию электромагнитной мощности НТ и продолжим его до пересечения с окружностью токов в точке Е. Таким образом, рассматриваемая круговая диаграмма может быть использована для получения параметров рабочих характеристик лишь на участке НЕ окружности токов. Рассмотрим порядок определения параметров асинхронного двигателя для режима его работы, определяемого точкой D на окружности токов (рис. 6.2). Токи. Соединив точку D с точками Н п О, получим треугольник токов ООН, стороны которого определяют: ток статора /1 = = ODmi, ток холостого хода иОНт, и ток ротора h /ci=HDmi. Опустив перпендикуляр из точки D на ось абсцисс Da, получим прямоугольный треугольник ODa, катеты которого определяют активную Iia=Dami и реактивную Ii = Oami составляющие тока статора. Подводимая мощность Р]. Известно, что подводимая к двигателю мощность Я1 = /П1/1ном/1СОЗф1, но так как f7iHOM=const, а /i cos ф1=/1а, то мощность Pi прямо пропорциональна активной составляющей тока статора. Следовательно, подводимую к двигателю активную мощность можно определить по формуле Pi = Damp, (6.35) где /Ир = mi [/[номг-10-3 -масштаб мощности, кВт/мм. Подводимую мощность отсчитывают от оси абсцисс, которую называют линией подводимой мощности, до заданной точки на окружности токов. Полезная мощность Рг. Полезную мощность на круговой диаграмме отсчитывают по вертикали от точки D на окружности токов до линии полезной мощности НК. Для заданной точки на окружности токов Р, - тр Db. (6.36) Электромагнитная мощность и электромагнитный момент. Для заданной точки D на окружности тока электромагнитная мощность тр Dc. (6.37) Электромагнитный момент двигателя М = Рэм/(01 = 30Рз /л 1 = ЗО/Ир Dc/n i, M = mDc, (6.38) где Шм - масштаб моментов, Н.м/мм: m = 30m,t/j m./n j. (6.39) Коэффициент мощности. Для определения коэффициента мощности cos ф1 на оси ординат строим полуокружность произвольного диаметра. Тогда для заданной точки D на окружности токов получим cos ф1 = O/i/Of. Для удобства расчетов целесообразно диаметр полуокружности Of принять равным 100 мм. В этом случае cos ф1 = О/г/100.
|
|
© 2010 www.sigma-test.ru Санкт-Петербург: +7 (812) 265-34-48, +7 (812) 567-94-10
Разработка и поддержка сайта: +7(495)795-01-39 после гудка 148651, sigma-test.ru(my_love_dog)r01-service.ru Копирование текстовой и графической информации разрешено при наличии ссылки. |